

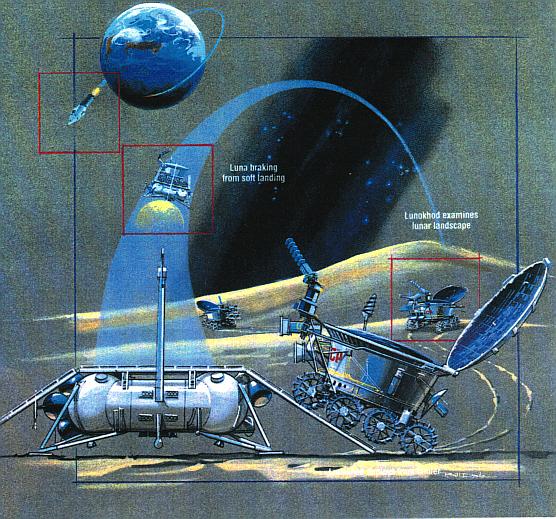
Diagramma della missione Lunochod.
Lunochod 1 e 2 furono due rover lanciati dall'URSS per l'esplorazione della Luna. Le missioni Lunochod furono progettate principalmente per l'esplorazione della superficie lunare, la raccolta di immagini e lo studio di altri parametri ambientali della Luna.
Sviluppo.
Lo scopo originale delle sonde robotiche era quello di individuare e studiare delle aree lunari adatte per l'atterraggio e per la creazione di basi lunari; inoltre fu previsto che le sonde avessero a bordo un radiofaro che doveva semplificare le operazioni di allunaggio di eventuali veicoli con uomini a bordo. Originariamente il progetto prevedeva l'uso del rover da parte di un cosmonauta in caso di guasto del lander principale LK per poter raggiungere quello di riserva. In realtà, dopo lo sbarco delle missioni del Programma Apollo e la susseguente cancellazione dell'analogo progetto sovietico furono utilizzati solo per l'esplorazione del nostro satellite. Il progetto dei rover, la loro realizzazione e controllo nel corso delle missioni spaziali erano sotto la supervisione di Aleksandr Kemurdžian.
L'antenna che serviva a guidare i rover e l'edificio dove vennero testati.
Lunochod 1.
Lunochod 1 (in russo Луноход), portato sulla Luna dalla sonda Luna 17, fu il primo rover controllato a distanza ad atterrare su un altro mondo. Dopo un primo tentativo fallito, terminato con la distruzione del vettore e del suo carico il 19 febbraio 1969, Luna 17 fu lanciata il 10 novembre 1970 alle 14:44:01 UTC e dopo aver raggiunto un'orbita di parcheggio, fu acceso l'ultimo stadio del vettore (alle 14:54 UTC) che pose la sonda sulla rotta per la Luna. Dopo due manovre di correzione, effettuate il 12 e il 14 novembre, il robot entrava in orbita lunare il 15 novembre alle 22:00 UTC. La navicella atterrava con successo sulla Luna nel Mare Imbrium il 17 novembre alle 03:47 UTC. Il lander era costituito da due diverse rampe dalle quali il rover poteva scendere sulla superficie. Alle 06:28 UTC la macchina effettuò i primi passi sul nostro satellite. Rimase attivo per 322 giorni terrestri, percorrendo circa 10,5 km e trasmettendo oltre 20.000 immagini durante il suo periodo di attività. Il motivo che ha portato il rover ad un malfunzionamento critico e la perdita di ogni contatto in data 14 settembre 1971 è tuttora sconosciuto.
Descrizione del Rover, ritrovamento e usi odierni.
l Lunochod 1 aveva all'incirca la forma di una vasca ricoperta da un coperchio convesso con sotto di esso 8 ruote indipendenti e lungo circa 2.3 metri. L'equipaggiamento della sonda prevedeva un'antenna conica, una ad elica direzionale, quattro videocamere ed un braccio estensibile per testare la consistenza e le proprietà del suolo lunare. A bordo trovavano posto uno spettrometro a raggi X, un telescopio a raggi X e un rilevatore di raggi cosmici. L'energia veniva fornita da una batteria che veniva ricaricata durante il giorno lunare da pannelli solari. Durante la notte lunare, il pannello solare veniva richiuso e un generatore di calore al polonio-210 riscaldava gli strumenti portandoli ad una temperatura adatta al loro funzionamento. Il rover era alto 135 cm e aveva una massa di 840 kg, lungo 170 cm e largo 160 cm e disponeva di un motore e freno per ogni ruota. Si poteva muovere a due velocità diverse: 0,8 km/h e 2 km/h. La posizione finale del Lunochod 1 è rimasta incerta fino al 2010; poiché degli esperimenti effettuati con dei telemetri laser non sono riusciti a rilevare un segnale riflesso dal suo retro-riflettore. Albert Abdrakhimov ha ritrovato entrambi i rover il giorno 17 marzo 2010, in una foto effettuata dal Lunar Reconnaissance Orbiter (image M114185541RC). Nell'aprile 2010 il team dell'osservatorio di Apache Point utilizzò delle immagini LRO per posizionare l'orbiter ed effettuare una misurazione con il telemetro laser di bordo che fornì una corretta misurazione nel giorno 22 aprile 2010; APOLLO (Apache Point Observatory Lunar Laser-Ranging Operation) sta usando il retroreflettore del Lunochod 1 per degli studi; è stato scoperto, nella più totale sorpresa, che il riflettore riflette più luce del resto degli altri riflettori lasciati sulla Luna. Secondo un articolo di stampa rilasciato dalla NASA, il ricercatore Tom Murphy dichiarò di: "Aver ricevuto circa 2000 fotoni dal Lunochod 1 solo al primo tentativo, dopo 40 anni di silenzio; questo rover ha ancora tanto da raccontarci". Nel novembre 2010, la locazione finale del rover è stata determinata con un margine di errore di circa 1 centimetro; la posizione del rover (38.2378°N - 35.0017°W), combinata con l'abilità di effettuare la telemetria laser anche in presenza della luce solare, risulterà particolarmente utile per determinare molti aspetti del sistema terrestre e lunare. 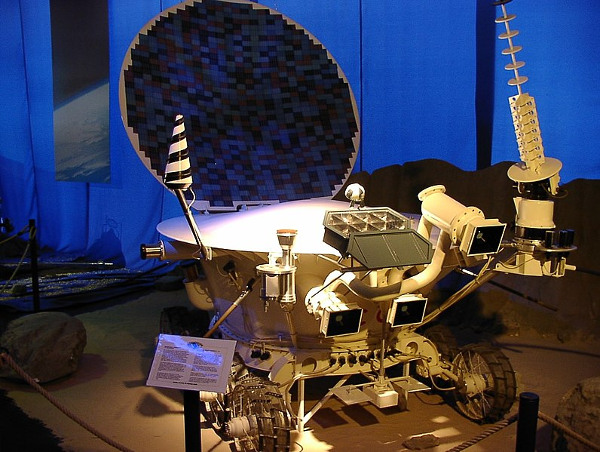
Modello del Lunokhod.
Lunochod 2
Il Lunochod 2, portato dalla sonda Luna 21, fu il secondo rover robotico a scendere sulla superficie della Luna. Il vettore SL-12/D-1-e mise la nave spaziale in orbita terrestre l'8 gennaio del 1973, il 12 gennaio la navicella raggiungeva la sua orbita lunare e successivamente avveniva l'allunaggio del rover. Gli obiettivi primari della missione includevano la raccolta di immagini del suolo lunare, la rilevazione dei livelli di luce per determinare la convenienza di osservazioni astronomiche eseguite dalla Luna, un test con laser per determinare la distanza con la Terra, l'osservazione dei raggi X solari, misurazioni del campo magnetico locale e un test sulle proprietà meccaniche del suolo. Rimase attivo per circa quattro mesi, percorrendo circa 37 km (record battuto dal rover Opportunity solo il 27 luglio 2014) e trasmettendo oltre 80 000 immagini. Fu il "coperchio" dell'apparecchio a segnare il destino finale della macchina; durante l'attraversamento di un cratere, il pannello solare, aperto in posizione orizzontale per tenere i pannelli orientati verso il sole, si ricoprì di terreno lunare; quando il rover dovette chiudere il coperchio per proteggersi dal freddo della notte lunare rovesciò il terriccio coprendo il radiatore dell'unità di scambiamento termico, necessaria durante il giorno per dissipare il tremendo calore. Durante il giorno lunare successivo, venne registrato un innalzamento della temperatura interna e l'incapacità del rover di raffreddarsi, rendendo il rover inutilizzabile. I contatti del Lunochod 2 vennero persi l'11 maggio 1973.
Descrizione del Rover.
Il Lunochod 2 era equipaggiato in modo simile al Lunochod 1 ma con apparecchiature e strumenti di misura aggiuntivi per adempiere agli obiettivi della missione; inoltre portava un'ulteriore videocamera montata in alto sul rover per facilitare la navigazione, rivelatasi difficoltosa a causa del ristretto campo visivo delle videocamere montate troppo in basso sul modello precedente ed in grado, come le altre due simili videocamere anteriori, di catturare immagini ad alta risoluzione del paesaggio circostante. Queste immagini servivano ad un team di cinque persone che, grazie ad esse, guidavano il rover in tempo reale da un complesso (NIP-10) costruito appositamente nei pressi di Sinferopoli. L'energia elettrica era fornita da un generatore solare il quale ricaricava le batterie principali del robot mentre, durante le lunghe notti lunari, un generatore al polonio-210 forniva il calore necessario al corretto funzionamento dei dispositivi elettrici.
Lunochod 3.
Fu costruito ma non fu mai lanciato sulla Luna, attualmente si trova in un museo nei pressi di Mosca. I rover costruiti per essere destinati al volo spaziale sono stati quindi in tutto quattro.
Fonte: https://it.wikipedia.org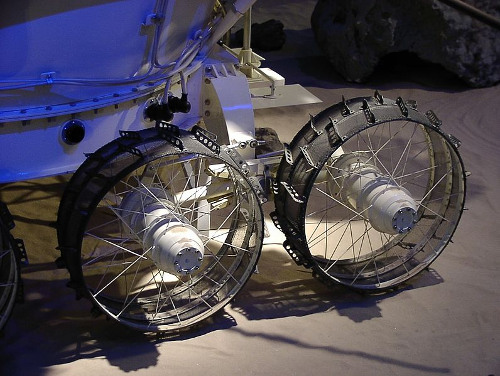
Dettaglio delle ruote.


