


Ci affiancheranno sul lavoro, salveranno vite in caso di pericolo, saranno d’aiuto nelle case e potranno anche esplorare il nostro organismo. I robot “soffici” rappresentano una delle sfide più promettenti della robotica e i loro ambiti di impiego spaziano dalla medicina alla gestione delle emergenze. A spiegarlo è Cecilia Laschi, professore all’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa, inserita tra le menti più geniali della robotica mondiale dalla comunità internazionale degli esperti di robotica nel 2015 e considerata tra i precursori mondiali di questa innovativa disciplina di ricerca.
La soft robotics – o robotica “soffice” – realizza prototipi ben distanti dal nostro comune ideale di robot fatto di acciaio e circuiti. Può spiegarci in cosa consiste questa disciplina?
Se finora abbiamo immaginato e costruito robot “rigidi” utilizzando materiali metallici, con la soft robotics andiamo a realizzare robot “soffici” che si deformano quando vengono sollecitati, capaci di acquisire nuove abilità come allungarsi, crescere, cambiare forma ed evolvere. Questa scelta nasce da un’attenta osservazione della natura, in cui le caratteristiche di deformabilità degli organismi viventi costituiscono un importante vantaggio in termini di sopravvivenza ed evoluzione, che permette a piante e animali di adattarsi meglio agli ambienti. Abbiamo compreso che, se volevamo utilizzare i robot non solo come strumenti “rigidi” per uso industriale, era necessario sviluppare nuove soluzioni che permettessero loro di essere adattabili ai diversi ambienti e muoversi con maggiore autonomia.
Può illustrarci alcuni esempi di robot “soffici” e il percorso che ha portato alla loro realizzazione?
Alla Scuola Superiore Sant’Anna siamo partiti con l’osservazione e lo studio del polpo, un animale privo di scheletro e in grado di svolgere compiti estremamente complessi, come camminare sui fondali marini, nuotare o afferrare oggetti. Le ricerche ci hanno portato a realizzare OCTOPUS, il primo robot “soffice” dalle sembianze di un polpo, che è stato un progetto fondamentale per la nascita della robotica soft e che ha fornito le basi tecnologiche per lo sviluppo di questo settore di ricerca in tutto il mondo. Il nostro lavoro è proseguito con la realizzazione di altri prototipi di robot “soffici”, come l’endoscopio a rigidità variabile STIFF-FLOP realizzato dai colleghi Menciassi e Cianchetti, che può essere utilizzato all’interno del corpo senza ferire gli organi interni, oppure il braccio robotico “soffice” I-SUPPORT finanziato nell’ambito di Horizon 2020, che aiuta gli anziani a lavarsi sotto la doccia.
Sulla rivista Science Lei ha da poco firmato un articolo in cui illustra le prospettive e le prossime sfide scientifiche della soft robotics. Può spiegarle anche a noi?
Le prospettive della soft robotics sono enormi e aprono la strada a scenari finora impossibili da immaginare. Dobbiamo pensare a robot capaci di strisciare sotto una porta, rimarginare le proprie “ferite”, mimetizzarsi nei diversi ambienti e persino crescere, aumentando realmente la quantità di materiale che li compone. Queste caratteristiche, unite alla loro adattabilità, ci consentono di utilizzarli in moltissimi campi, a partire dall’ambito biomedico fino all’esplorazione di ambienti sconosciuti come le profondità del mare o i terreni impervi. Potremmo ad esempio impiegarli per operazioni di salvataggio in scenari di pericolo o di macerie. Al momento tutti i principali centri di ricerca del mondo, dagli USA al Giappone, sono impegnati nello sviluppo di nuovi prototipi utilizzabili in moltissimi settori, mentre l’Italia, riconosciuta a livello internazionale come pioniera di questo settore di ricerca, sembra aver rallentato il proprio impegno, quando si prevedono importanti sviluppi applicativi.
Se dovesse immaginare il mondo tra 30 anni come lo vedrebbe? I robot saranno parte integrante delle nostre vite? Ci ruberanno il lavoro?
Rispetto a quanto immaginato dalla fantascienza classica, non vedo un futuro fatto di robot umanoidi, ma tanti piccoli oggetti robotici che ci forniranno il loro aiuto nelle faccende quotidiane. Saranno robot “morbidi” e sostanzialmente autonomi, più simili a organismi viventi animali o vegetali. Nelle abitazioni, ad esempio, il sogno è che ci possano dare una mano nel fare le pulizie, rifare i letti e stirare, e già oggi sono presenti sul mercato i primi esempi in questo senso, come i robot aspirapolvere. In ambito lavorativo, invece, non credo affatto che i robot sostituiranno l’uomo, ma piuttosto che lavoreranno al suo fianco, facilitandone i compiti ed entrando in gioco nei momenti di pericolo. Il lavoro umano non scomparirà, ma sarà svolto con strumenti più utili e sofisticati come i robot e diventerà più qualificato e qualificante.
Fonte: http://www.altrogiornale.org

Un nuovo pesce robotico è stato sviluppato da un gruppo di ricercatori del MIT. Denominato SoFi, è un robot che si sposta nelle acque con le movenze di un vero pesce: scivola silenzioso con un movimento regolare di tipo ondulatorio, proprio come nuotano i veri pesci (vedi anche il video più sotto). Il pesce-robot, lungo circa mezzo metro, può notare in tre dimensioni (su e giù, sinistre destra, avanti e indietro) e viene telecomandato tramite un controller ad ultrasuoni utilizzato da un sub. Il robot può arrivare ad una profondità di circa 20 metri e può rivelarsi utilissimo per studiare le faune acquatiche molto da vicino senza spaventare i pesci.
È proprio questo lo scopo di SoFi: realizzare osservazione a distanza ravvicinata di tutti quegli animali, che spesso si rivelano affascinanti ma anche molto timorosi nei confronti di qualsiasi corpo ritenuto come estraneo, delle profondità oceaniche. Le dimensioni, i movimenti, i colori e le fattezze sono tra Le caratteristiche più realistiche che sia mai capitato di vedere per quanto riguarda un robot a forma di pesce (non è infatti la prima volta che si tenta di realizzare un robot ispirato a questo animale acquatico).
Le parti elettroniche sono racchiuse all’interno di sezioni a tenuta stagna mentre la propulsione del pesce è attivata tramite una piccola pompa ad olio su un lato della coda. Quest’ultima si flette avanti e indietro e fa sì che il pesce robotico possa arrivare a muoversi con una velocità massima di 21,7 cm al secondo.
SoFi è già stato testato delle acque al largo delle isole Fiji, intorno a varie barriere coralline. Il robot non ha per nulla spaventato i pesci, anche quelli più vicini.
Attualmente il problema principale è rappresentato dalla comunicazione: le radiofrequenze, di quelle che normalmente si utilizzano per comunicare con i robot, non funzionano molto bene nell’acqua. se per telecomandare il robot viene utilizzato un comando ad ultrasuoni, diverso è il discorso per eventuali dati che lo stesso robot potrebbe trasmettere verso l’esterno, ossia al di fuori dell’acqua, un problema che comunque il team sta affrontando dato che intende dare a SoFi la possibilità di trasmettere video e immagini in maniera dettagliata.
Fonte e link: http://notiziescientifiche.it
Il robot dell'immaginario collettivo è una macchina composta da duro metallo, rumorosi pistoni idraulici e servomotori, e un aspetto anche solo vagamente umano. A questo ci hanno abituato i film di fantascienza dell'ultimo secolo, ed è effettivamente la direzione verso cui la ricerca si è orientata. La robotica, in realtà, è oggi in grado di replicare differenti forme riscontrabili in natura, molluschi compresi.
George M. Whitesides, ricercatore della Woodford L. and Ann A. Flowers University, ha sviluppato con il suo team una serie di soft-bots, robot "morbidi" capaci di imitare una gamma non tradizionale di organismi viventi. Sono più simili a molluschi che a ragni, cani ed esseri umani.
I robot pneumatici di Whitesides sono capaci di ingrandire o ridurre le loro dimensioni in base alle necessità del momento, assumere forme proibitive per un robot "solido", e superare ostacoli tipicamente presenti in situazioni di emergenza, come terremoti e altre catastrofi più o meno naturali.
"Se ci si guarda attorno, la maggior parte dei robot sono cose che somigliano ad esseri umani o a parti dell'essere umano" spiega Whitesides. "I robot che lavorano alle catene di montaggio delle automobili sono soltanto la parte superiore di un corpo umano fissata al terreno".
"Ci sono comunque moltissimi tipi di animali che eseguono azioni in modi differenti, e queste creature non sono state sufficientemente osservate perchè ci siamo fissati su una particolare prospettiva. La chiave di questa ricerca è che abbiamo posto questa domanda: perchè non costruire qualcosa di simile ad un calamaro?".
Whitesides e il suo team hanno sviluppato due classi di robot: la prima somiglia ad un calamaro, ed è dotata di una capacità di movimento tale da consentire il superamento di quasi ogni tipo di ostacolo; la seconda è modellata prendendo ispirazione dalle stelle marine, e verrà impiegata in futuro come mano sintetica dalla presa salda ma gentile.
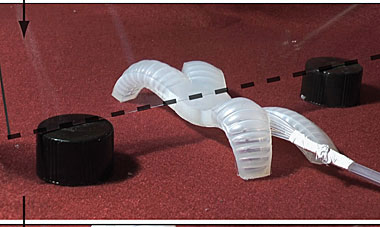
Questi robot dal design particolare sfruttano l'aria compressa per eseguire una vasta gamma di operazioni, dal "fare il limbo" strusciando come un lombrico sul piano d'appoggio, fino ad afferrare un uovo con delicatezza. Il movimento di questi robot è assicurato dallo stesso sistema che consente loro di afferrare un oggetto: una serie di cilindri ad aria compressa che aprono e si chiudono in sequenza, muovendo gli arti sintetici di queste creature artificiali.
Il grado di flessibilità ottenuto tramite questa strategia è impressionante: i robot possono abbassarsi fino a raggiungere un'altezza totale di 2 centimetri, e possono quindi infilarsi in spazi proibitivi per tutti i robot tradizionali, l'ideale per una situazione di ricerca e soccorso. Questi soft-bots possono essere equipaggiati con sensori chimici, microcamere, segnalatori GPS. mini contatori Geiger, e tutto l'occorrente per poter ottenere dati dal sito d'impiego.
"Se gli edifici sono collassati e i detriti sono instabili, o c'è la possibilità che una scossa di assestamento provochi altri danni, nessuno vorrebbe trovarsi tra le macerie. Ma potrebbero esserci persone sepolte, per cui si possono inviare questi robot".
"I robot tradizionali" continua Whitesides "sono difficili da utilizzare perchè non sono buoni scalatori, sono pesanti, e tendono ad essere instabili. Il nostro design, tuttavia, rimane aderente al terreno, per cui i robot sono molto stabili e possono passare sopra e sotto ogni tipo di ostacolo".
Ma il futuro di queste macchine potrebbe essere anche la sala operatoria, nel ruolo di "mani aggiuntive": "Possono essere dei validi aiutanti. Se si deve spostare del tessuto danneggiato, o se si deve reggere un piccolo lembo di un organo delicato che si sta suturando, la presa gentile di questi robot potrebbe fornirci una strada alternativa".
Il grosso vantaggio dei soft-bots è anche nella facilità di realizzazione: possono essere stampati da una stampante tridimensionale e assemblati velocemente tramite semplice silicone. "Possiamo fare uno stampo, distribuire il polimero, e assemblare questi robot in circa due ore. In futuro potremmo avere design così economici da poter accumulare questi robot e gettarli dopo un singolo utilizzo".
Una tale semplicità potrebbe essere un grosso vantaggio anche nell'esplorazione dello spazio. Immaginate un soft-bot simile a quello del video di questo post, ideato per l'esplorazione di Marte: i tecnici della missione potrebbero tralasciare quasi completamente la fase di realizzazione della propulsione e dello scheletro del rover, dedicandosi interamente alla strumentazione scientifica e all'intelligenza artificiale.
Fonte: http://www.ditadifulmine.com


